chap 2-2 分治算法-排序和选择
1. 快速排序(Quicksort)
排序算法经常用到分治策略。在现实中,最常用的排序算法当属快速排序。主要过程:首先进行partition操作,从数组中挑选一个元素作为主元pivot,将小于pivot的元素放置到它的左边,将大于pivot的元素放置到它的右边;然后递归地对pivot左右两边的数组进行partition。
具体实现如下:
1 | int partition(int* a, int l, int r) { |
下面进行复杂度的分析,由于复杂度与选择的pivot有关,所以我们要逐一分析最坏、最好和平均的复杂度。
最坏情况复杂度:每次partition时都出现了极其不平衡的划分,分出了大小为$0$和$n-1$的两个子问题,递归表达式如下:
$$
T(n)=T(0)+T(n-1)+\Theta(n)=T(n-1)+\Theta(n)
$$
故最坏情况的复杂度为$\Theta(n^2)$。
最好情况复杂度:每次partition时都出现了恰好平衡的划分,递归表达式如下:
$$
T(n)=2T(n/2)+\Theta(n)
$$
故最好情况的复杂度为$\Theta(n\log n)$。
平均情况复杂度:假设输入的数据完全是随机的,则每个元素成为主元的概率为$1/n$($n$为本次划分的数组的大小)。若挑选的主元在数组中排第$i$位,则子问题的大小为$i-1$和$n-i$,列出以下递归表达式:
$$
T(n)=\frac{1}{n}\sum_{i=1}^{n}[T(i-1)+T(n-i)+O(n)]=O(n)+\frac{2}{n}\sum_{i=1}^{n-1}T(i)
$$
则:
$$
T(n-1)=O(n-1)+\frac{2}{n-1}\sum_{i=1}^{n-2}T(i)
$$
联合两个式子,可得:
$$
\begin{equation}
\begin{aligned}
T(n) & = \frac{n+1}{n}T(n-1)+O(1) \\ & =O(1)(1+\frac{n+1}{n}+\frac{n+1}{n-1}+\frac{n+1}{n-2}+\cdots+\frac{n+1}{1}) \\ &=O(1)[1+(n+1)\sum_{i=1}^n\frac{1}{i}] \\ &= O(n\log n)
\end{aligned}
\end{equation}
$$
故平均复杂度为$O(n\log n)$。但是这是在我们假定输入数据完全随机的条件下推导出的,在现实中很少会出现这种情况。为了保证较好的平均复杂度,我们每次partition时可以随机选取主元,人工引入随机因素。下面是随机版快速排序的实现:
1 | int randomized_partition(int* a, int l, int r) { |
随机版快速排序的良好性能使之成为排序大量数据的首选算法,包括Unix系统内置的文件排序命令。
2. 归并排序(Mergesort)
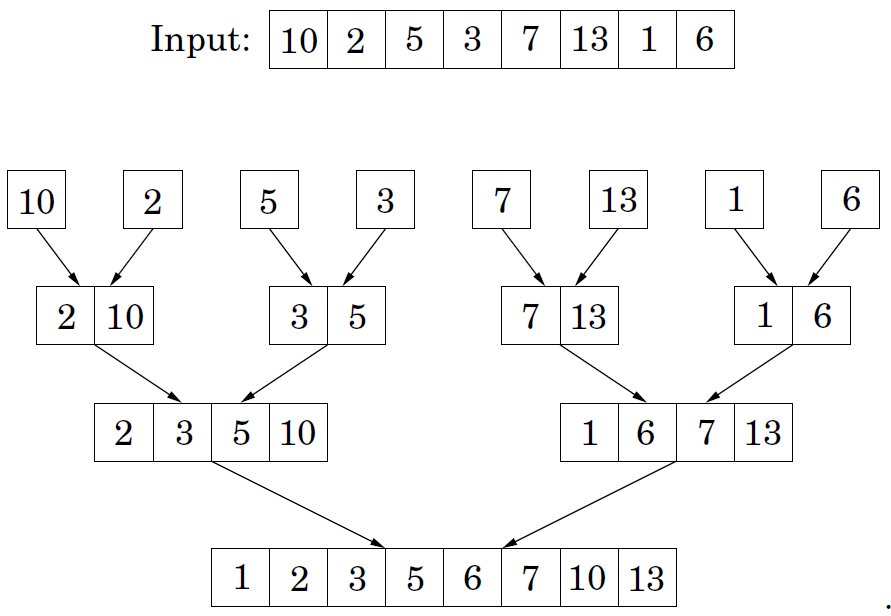
另一种比较容易想到的方法就是归并排序,主要过程:把数组分成两部分,分别排序好每个部分(子问题),然后进行合并操作(merge),返回排序好的整个数组。
伪代码:
1 | function mergesort(a[1:n]){ |
mergesort(a[1:n/2])和mergesort(a[n/2+1, n])是划分子问题,merge为合并操作。具体实现如下:
1 | void merge(int* a, int l, int m, int r) { |
下面分析该算法的复杂度,列出递归表达式:
$$
T(n)=2T(n/2)+O(n)
$$
根据主定理,易得复杂度为$O(n\log n)$。
虽然归并排序时间复杂度较低,但是每次归并(merge)操作都要复制数组,占用太多内存,空间复杂度较高。但如果需要排序的数据比内存还大,归并排序的思想就有用武之地了。
3. 外部归并排序(External Mergesort)
假设现在计算机的内存为8GB,硬盘中有128GB的数据需要排序,我们显然不能采取一般的排序方法:直接把数据全部装载到内存,然后一次性排好序,最后存回硬盘。我们可以利用归并排序的思想进行外部排序(external sorting):每次装载8GB数据到内存,排好序后(快排或其他)存回硬盘,重复16次,硬盘中就有了16个内部有序的子文件;然后对这16个文件进行合并操作,最终生成一个内部有序的大文件。内存中归并排序的不足是需要复制数组,而从硬盘装载数据到内存这一操作必须要复制数组,所以正好适合使用归并排序的思想。
外部归并排序与内存中归并排序的相同点是,都从最初一个个的有序数组开始,一步步合并成最后的一个有序数组;不同点是,外部归并排序最初的有序数组元素很多,而内存中归并排序最初的有序数组中只有一个元素。
下面详细阐述外部归并排序的步骤:
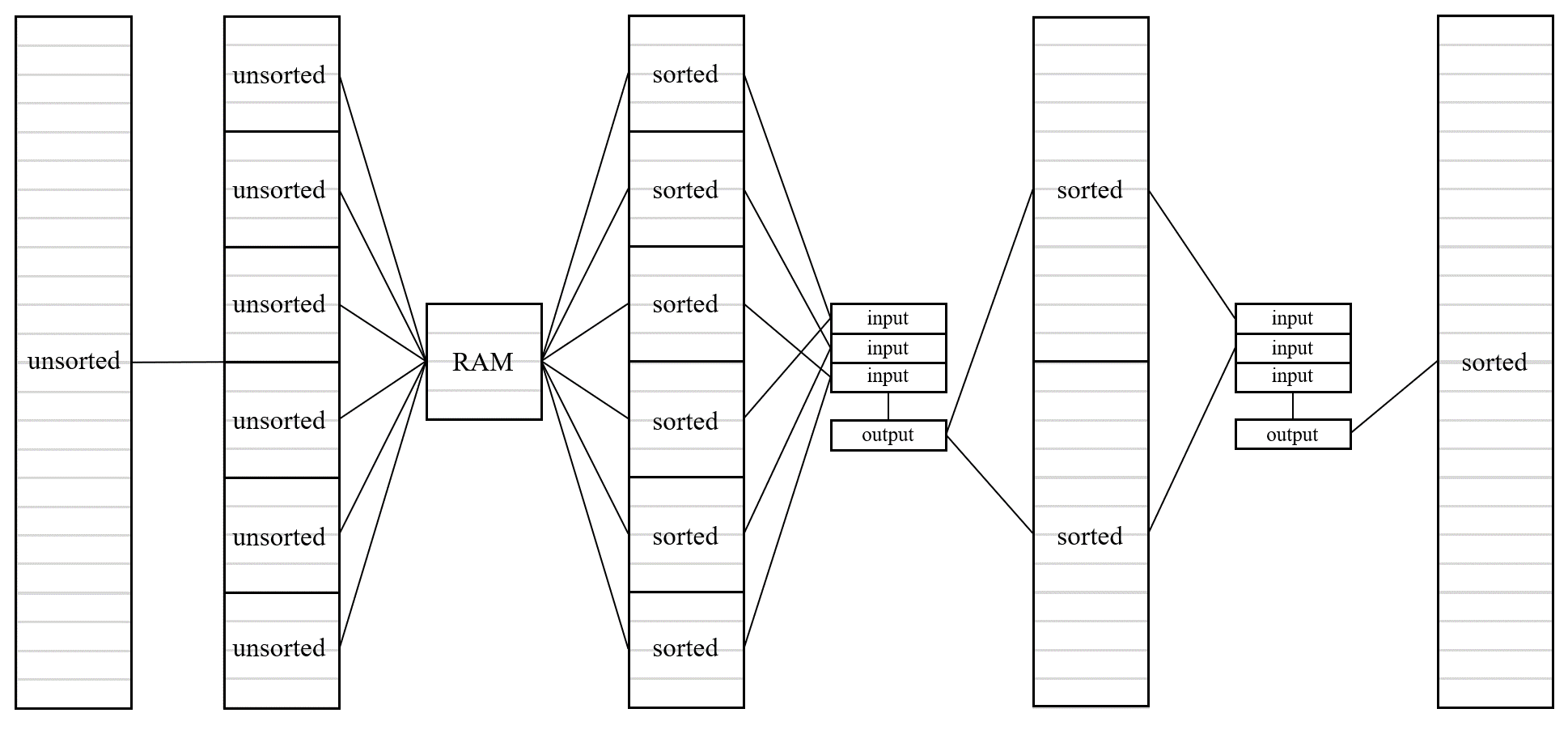
我们定义一次磁盘I/O传输的数据单元为一个page(假设一个page大小为4KB,在磁盘中通常被称为block),比如从硬盘中取16KB的数据进行排序,然后再写回磁盘,共需8次I/O。给定计算机的内存RAM大小为$B$-page,需要对磁盘中大小为$N$-page的文件进行排序($N>>B$),可以使用如下的外部归并排序方法。
首先进行conquer:每次从磁盘中装载$B$-pages的数据到RAM中,使用快排或其他方法对该$B$-pages数据进行排序,排序后将其全部写入磁盘中的一个文件中。重复上述步骤直至取完$N$-pages的数据,此时磁盘中应有$\lceil N/B\rceil$个有序的子文件,每个子文件的大小为$B$-page(可能不足$B$-page,下同)。
然后进行merge:现在的目标是将$\lceil N/B\rceil$个大小为$B$-pages的有序子文件合并成1个大小为$N$-pages的大文件。我们将RAM划分成两个部分,一部分是$B-1$个大小为$1$-page的input_buffer,另一部分是1个大小为$1$-page的output_buffer。每个input_buffer关联一个子文件,负责读取子文件中的数据。类比归并排序的合并操作,我们需要从所有input_buffer中找到最小/大的元素填入output_buffer中。若output_buffer填满,则将其中的数据flush到磁盘中的一个文件中;若某一个input_buffer中的数据被读取完,则继续从对应子文件中读入数据,直至所有关联的子文件的数据全被读完。经过上述的一次merge($B-1$路merge),我们能将$B-1$个有序子文件合并成1个大的有序文件($B(B-1)$-pages)。经过第一次conquer,生成了$\lceil N/B\rceil$个子文件,如果像上面每次merge了$B-1$个子文件,merge全部$\lceil N/B\rceil$个子文件,则会生成$\lceil \lceil N/B\rceil/(B-1)\rceil$个有序文件。我们称一次完整的上述过程为一个PASS,重复上述过程:
第1个PASS,$\lceil N/B\rceil$个大小为$B$-pages的有序文件合并成了$\lceil \lceil N/B\rceil/(B-1)\rceil$个大小为$B(B-1)$-pages的有序文件;
第2个PASS,$\lceil \lceil N/B\rceil/(B-1)\rceil$个大小为$B$-pages的有序文件合并成了$\lceil \lceil \lceil N/B\rceil/(B-1)\rceil/(B-1)\rceil$个大小为$B(B-1)^2$-pages的有序文件;
……
第$\lceil \log_{B-1}\lceil N/B\rceil\rceil$个PASS,最终只剩了1个大小为$N$-pages的有序文件,完成排序。
下面分析一下该算法耗费的时间,分为CPU计算的时间和磁盘I/O的时间。这里假设每个page含有$p$个元素,内存中排序使用快排,$k$路merge使用最普通的进行$k$次比较选出最小/大元素的方法。
先考虑CPU计算的时间。conquer阶段,进行了$\lceil N/B\rceil$次排序,每次排序的元素个数为$O(Bp)$,则耗费时间为$O(\lceil N/B\rceil Bp\log (Bp))=O(Np\log (Bp))$。每个PASS,output_buffer都一共会输出$Np$个元素,生成每个元素需要$O(B)$,故merge阶段,耗费时间为$O(NBp\lceil \log_{B-1}\lceil N/B\rceil\rceil)=O(NBp\log_B N)$。
再考虑磁盘I/O的时间。conquer和每个PASS,都需要读取和写入$N$-pages,故总的I/O次数为$2N(1+\lceil \log_{B-1}\lceil N/B\rceil\rceil)$。
分析可以发现,$N$和$p$大小不变时,增加$B$可以大大减少磁盘I/O的次数,但是却使merge操作耗费的时间大大增加,最终可能抵消了减少磁盘I/O带来的好处。实际测试中也发现,当$N$很大时,merge操作通常是性能瓶颈。其实有不少关于$k$路merge的优化方案,比如败者树等等,可以大大提升merge的性能,此处不再赘述。
4. 排序算法的下界
研究了这么久排序,那么排序算法最快能有多快呢?其实上述的所有排序,都可以用决策树模型来描述:
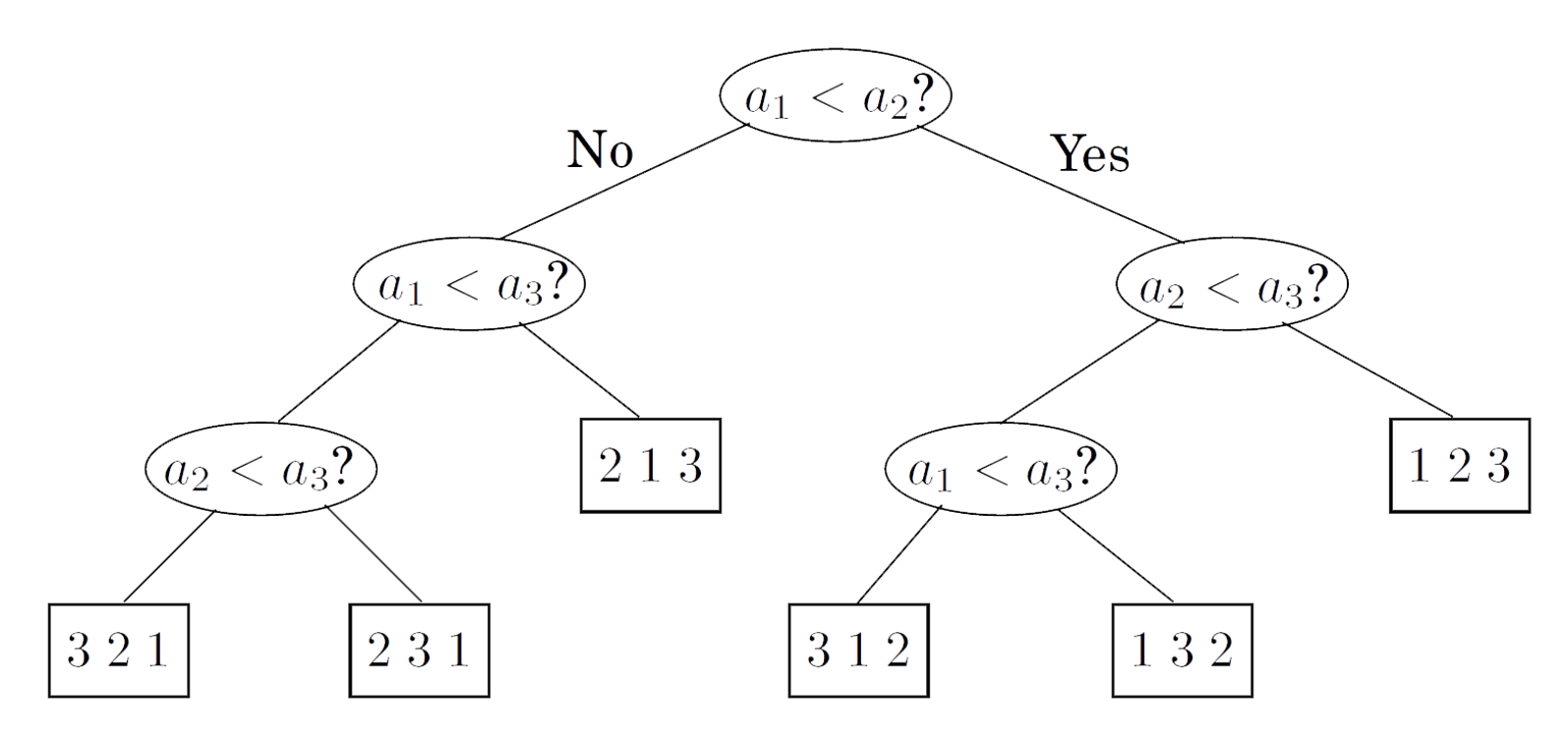
每一次排序,算法在做的事情都是寻找从根节点到叶节点的一条路径,叶节点就是排序的结果。这棵二叉树的深度就是最坏情况下我们需要比较的次数,可能的最小深度即是排序算法的下界。
通过观察我们发现,若输入数组长度为$n$,那么叶节点的数量至少为$n!$个。反证法,若某个排列不是叶节点,我们总能构造出一个符合这个排列的输入数组,与假设矛盾。因此,若该二叉树的深度为$d$,则它至多有$2^d$个叶节点,又因为叶节点的数量至少为$n!$个,则$n!\leq 2^d$,可以推出$d=\Omega(\log (n!))=\Omega(n\log n)$。
综上所述,基于比较的排序算法的下界为$\Omega(n\log n)$。注意该结论成立的前提是,我们使用比较的方法确定顺序。若数据满足一定的条件,我们甚至可以在线性时间内完成排序,比如计数排序、基数排序等等。
5. 快速选择算法
有些时候,我们并不需要对数据进行排序,我们可能只想知道最大的是哪个,中位数是哪个,最小的是哪个等等。我们需要设计一个选择算法select,返回数组中排名第$k$的元素。回想快速排序,我们选择主元,然后把比它小的和比它大的都排到它左右两边,如果$k$比主元的索引还小,那排名第$k$的元素必然在左边的数组。
受到快排的启发,我们可以设计如下的快速选择算法,同样利用了分治,令$S$为输入的数组,令主元为$v$,$S_L$为比$v$小的子数组,$S_R$为比$v$大的子数组,$S_v$为值都等于$v$的子数组,则排名为第$k$为的元素值为:
$$
\begin{equation}
select(S, k)=
\begin{cases}
select(S_L,k), & k\leq|S_L| \\ v, & |S_L|<k\leq|S_L|+|S_v| \\ select(S_R,k), & k>|S_L|+|S_v|
\end{cases}
\end{equation}
$$
具体实现如下:
1 | pair<int, int> split(int* a, int l, int r, int val) { |
我们用split()代替了partition(),二者功能基本相同,但split()可以处理有多个相同主元的情况,返回相同主元区域的左右边界。上述代码实现的split()操作是原地进行的(in place),会改变原数组的元素顺序。
快速选择与快排的思路基本相同,但是快速选择算法每次分治后,只处理一个子问题,而快排需要处理两个。那两者的复杂度有区别吗?
最坏情况复杂度:选择最小的元素,但是每次挑选主元都选了最大的,递归表达式如下:
$$
T(n)=n+(n-1)+\cdots+1=\Theta(n^2)
$$
故最坏情况的复杂度为$\Theta(n^2)$。
最好情况复杂度:第一次挑选主元都选到了第$k$位的元素,等同于split()的复杂度$O(n)$。
平均情况复杂度:假设所有元素互异,排第$i$位的元素被选取为主元的概率为$1/n$,$k$小于$i$的概率为$(i-1)/n$,$k$大于$i$的概率为$(n-i)/n$,$k$等于$i$的概率为$1/n$。可以列出以下递归关系式:
$$
\begin{equation}
\begin{aligned}
T(n) & = \frac{1}{n}\sum_{i=1}^n [\frac{i-1}{n}T(i-1)+\frac{1}{n}O(1)+\frac{n-i}{n}T(n-i)+O(n)] \\ & = \frac{1}{n^2}\sum_{i=1}^n[(i-1)T(i-1)+(n-i)T(n-i)]+O(n)
\end{aligned}
\end{equation}
$$
则:
$$
T(n-1)=\frac{1}{(n-1)^2}\sum_{i=1}^{n-1}[(i-1)T(i-1)+(n-1-i)T(n-1-i)]+O(n-1)
$$
联合两个式子,得:
$$
\begin{equation}
\begin{aligned}
T(n) & = \frac{(n+1)(n-1)}{n^2}T(n-1)+O(1) \\ &= O(1)[1+\frac{(n+1)(n-1)}{n\cdot n}+\frac{(n+1)(n-2)}{n(n-1)}+\frac{(n+1)(n-3)}{n(n-2)}+\cdots] \\ &= O(1)[1+\frac{n+1}{n}(n-\sum_{i=1}^n \frac{1}{i})] \\ &= O(n)
\end{aligned}
\end{equation}
$$
若存在相同元素,花费的时间显然小于$O(n)$,故平均复杂度为$O(n)$。
因此,利用分治策略,我们可以在$O(n)$时间内选出数组中排第$k$的元素。较常见的应用是寻找一个数组的中位数,只需要把快速选择算法的$k$设置为$(n+1)/2$。
Quick Link: 算法笔记整理